Fuzzy Inference System is the key unit of a fuzzy logic system having decision making as its primary work. It uses the “IF…THEN” rules along with connectors “OR” or “AND” for drawing essential decision rules.
Characteristics of Fuzzy Inference System
Following are some characteristics of FIS −
The output from FIS is always a fuzzy set irrespective of its input which can be fuzzy or crisp.
It is necessary to have fuzzy output when it is used as a controller.
A defuzzification unit would be there with FIS to convert fuzzy variables into crisp variables.
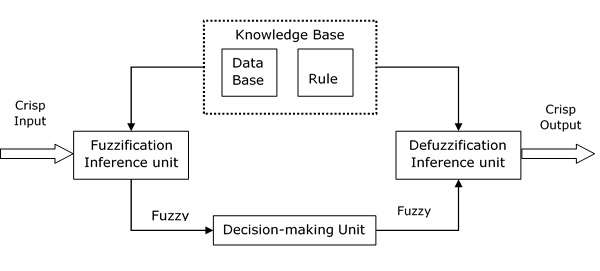
Functional Blocks of FIS
The following five functional blocks will help you understand the construction of FIS −
Rule Base − It contains fuzzy IF-THEN rules.
Database − It defines the membership functions of fuzzy sets used in fuzzy rules.
Decision-making Unit − It performs operation on rules.
Fuzzification Interface Unit − It converts the crisp quantities into fuzzy quantities.
Defuzzification Interface Unit − It converts the fuzzy quantities into crisp quantities. Following is a block diagram of fuzzy interference system.
Working of FIS
The working of the FIS consists of the following steps −
A fuzzification unit supports the application of numerous fuzzification methods, and converts the crisp input into fuzzy input.
A knowledge base - collection of rule base and database is formed upon the conversion of crisp input into fuzzy input.
The defuzzification unit fuzzy input is finally converted into crisp output.
Methods of FIS
Let us now discuss the different methods of FIS. Following are the two important methods of FIS, having different consequent of fuzzy rules −
- Mamdani Fuzzy Inference System
- Takagi-Sugeno Fuzzy Model (TS Method)
Mamdani Fuzzy Inference System
This system was proposed in 1975 by Ebhasim Mamdani. Basically, it was anticipated to control a steam engine and boiler combination by synthesizing a set of fuzzy rules obtained from people working on the system.
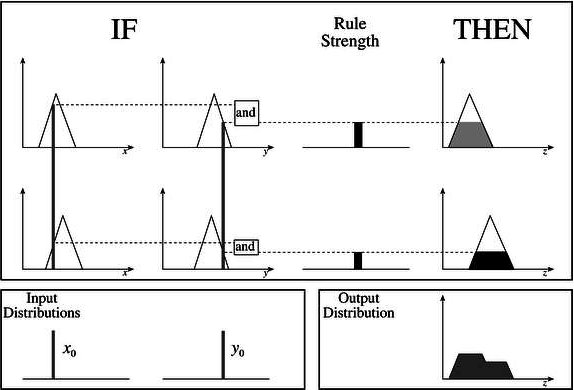
Steps for Computing the Output
Following steps need to be followed to compute the output from this FIS −
Step 1 − Set of fuzzy rules need to be determined in this step.
Step 2 − In this step, by using input membership function, the input would be made fuzzy.
Step 3 − Now establish the rule strength by combining the fuzzified inputs according to fuzzy rules.
Step 4 − In this step, determine the consequent of rule by combining the rule strength and the output membership function.
Step 5 − For getting output distribution combine all the consequents.
Step 6 − Finally, a defuzzified output distribution is obtained.
Following is a block diagram of Mamdani Fuzzy Interface System.
Takagi-Sugeno Fuzzy Model (TS Method)
This model was proposed by Takagi, Sugeno and Kang in 1985. Format of this rule is given as −
IF x is A and y is B THEN Z = f(x,y)
Here, AB are fuzzy sets in antecedents and z = f(x,y) is a crisp function in the consequent.
Fuzzy Inference Process
The fuzzy inference process under Takagi-Sugeno Fuzzy Model (TS Method) works in the following way −
Step 1: Fuzzifying the inputs − Here, the inputs of the system are made fuzzy.
Step 2: Applying the fuzzy operator − In this step, the fuzzy operators must be applied to get the output.
Rule Format of the Sugeno Form
The rule format of Sugeno form is given by −
if 7 = x and 9 = y then output is z = ax+by+c
Comparison between the two methods
Let us now understand the comparison between the Mamdani System and the Sugeno Model.
Output Membership Function − The main difference between them is on the basis of output membership function. The Sugeno output membership functions are either linear or constant.
Aggregation and Defuzzification Procedure − The difference between them also lies in the consequence of fuzzy rules and due to the same their aggregation and defuzzification procedure also differs.
Mathematical Rules − More mathematical rules exist for the Sugeno rule than the Mamdani rule.
Adjustable Parameters − The Sugeno controller has more adjustable parameters than the Mamdani controller.
Comments
Post a Comment